Jetson Autonomous Vehicle
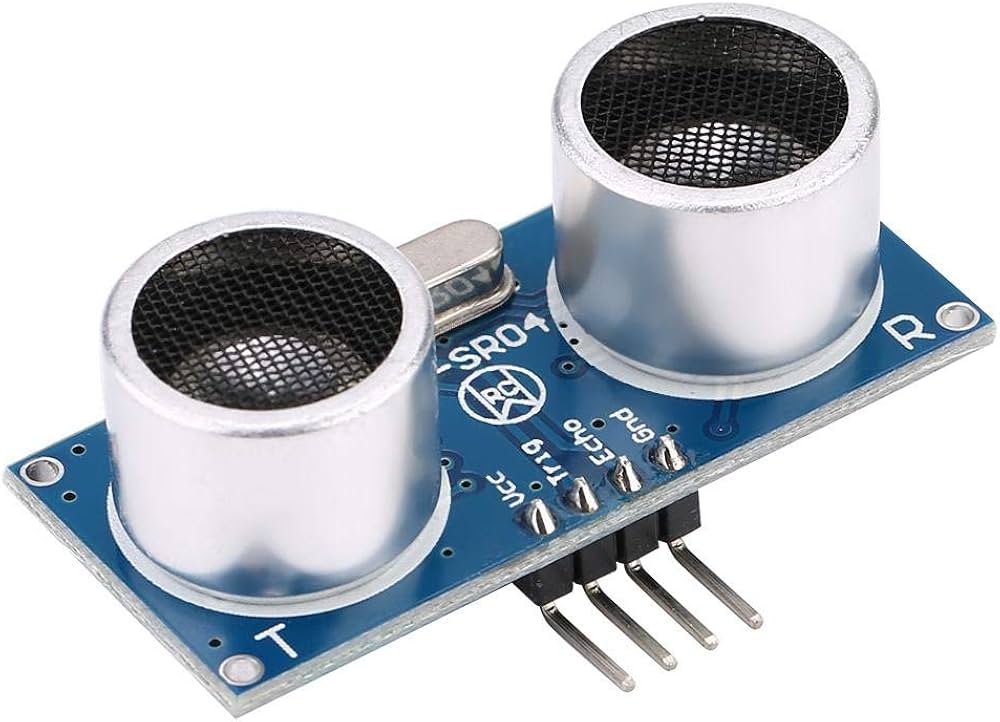
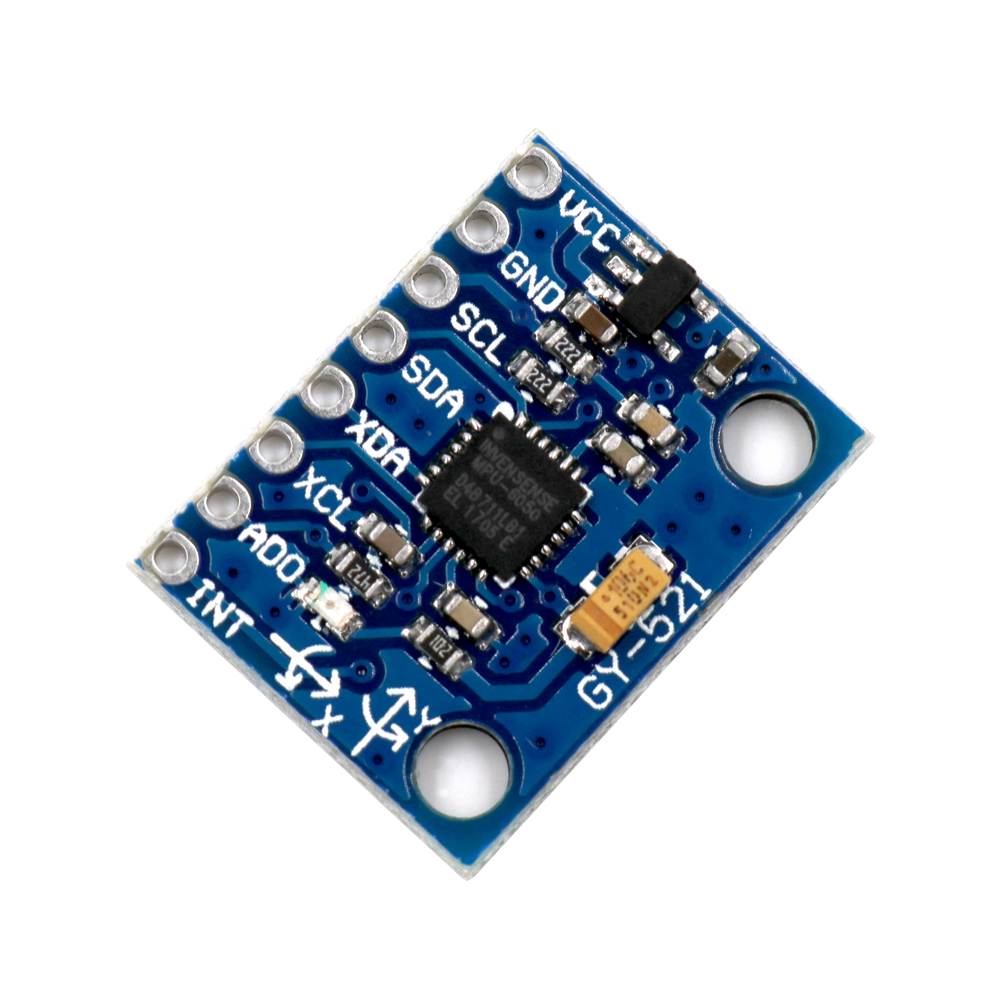
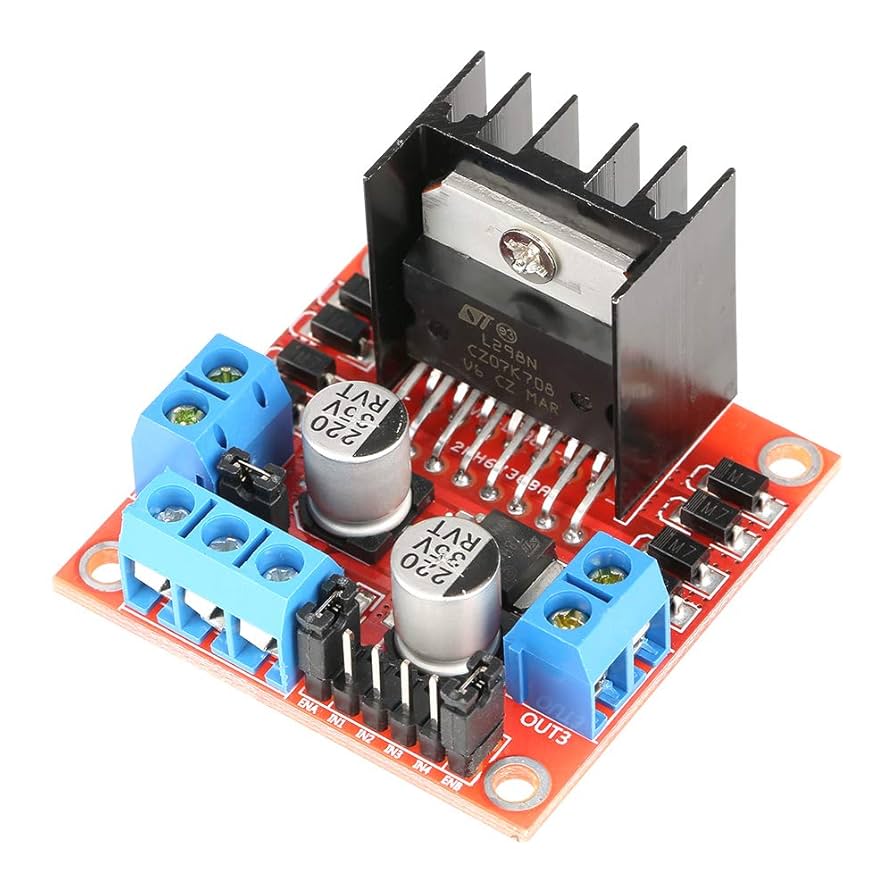
During the summer of 2025, I took my growing passion for self-driving cars and designed and built a 1:10-scale autonomous vehicle powered by an NVIDIA Jetson Nano as a personal passion project. I developed a custom chassis and motor control system, integrating ultrasonic sensors, IMU fusion, and a camera-based perception system to enable real-time 360° localization in dynamic environments. To enhance reliability, I implemented a fault detection module that monitored sensor health and maintained safe operation under uncertainty. Using TensorFlow, I trained a convolutional neural network on over 20,000 augmented frames for lane detection and obstacle avoidance, then deployed the model with CUDA-accelerated OpenCV preprocessing—achieving roughly 90% accuracy on test track evaluations.

My Jetson Self-Driving Car
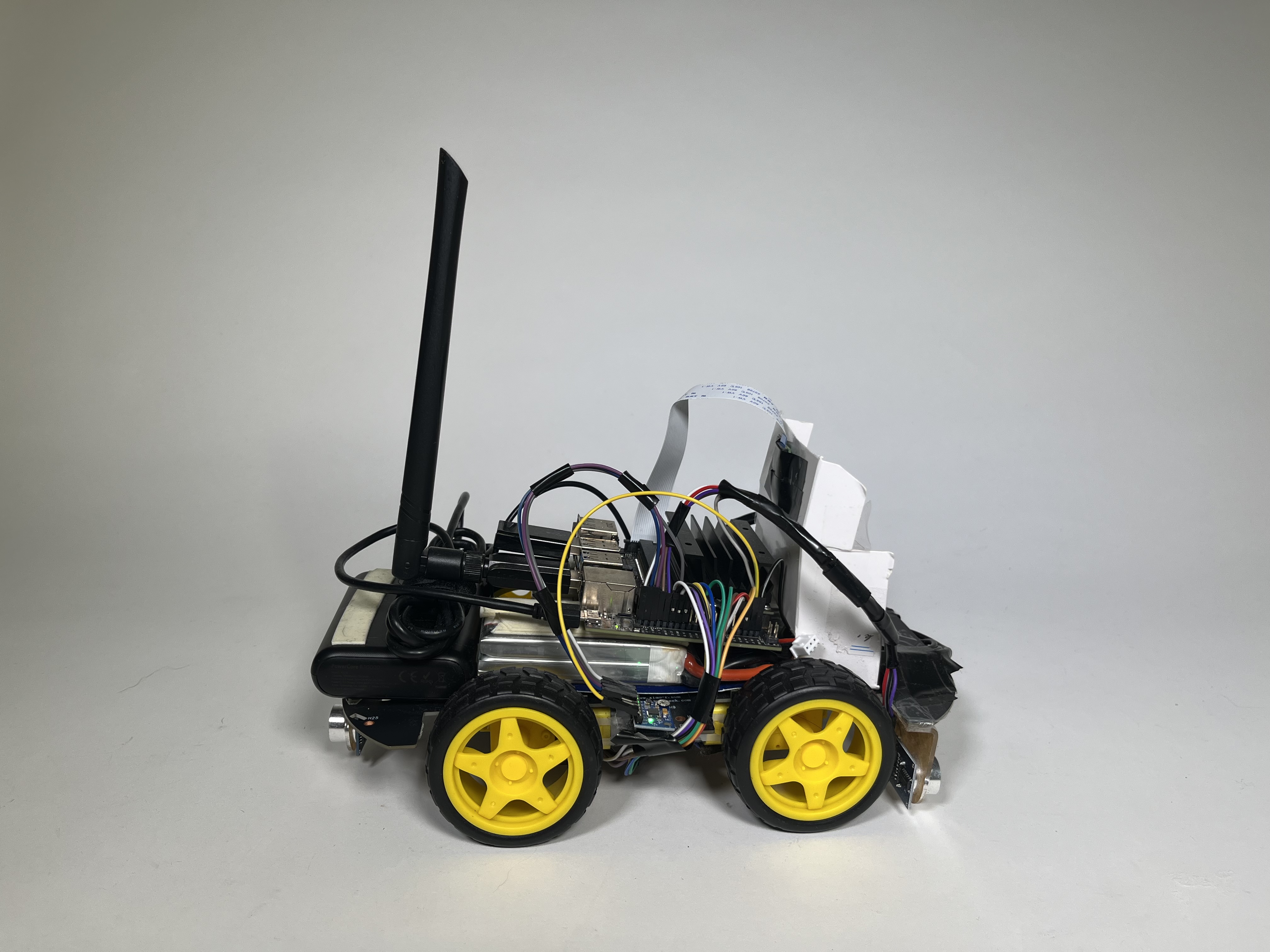
Side View
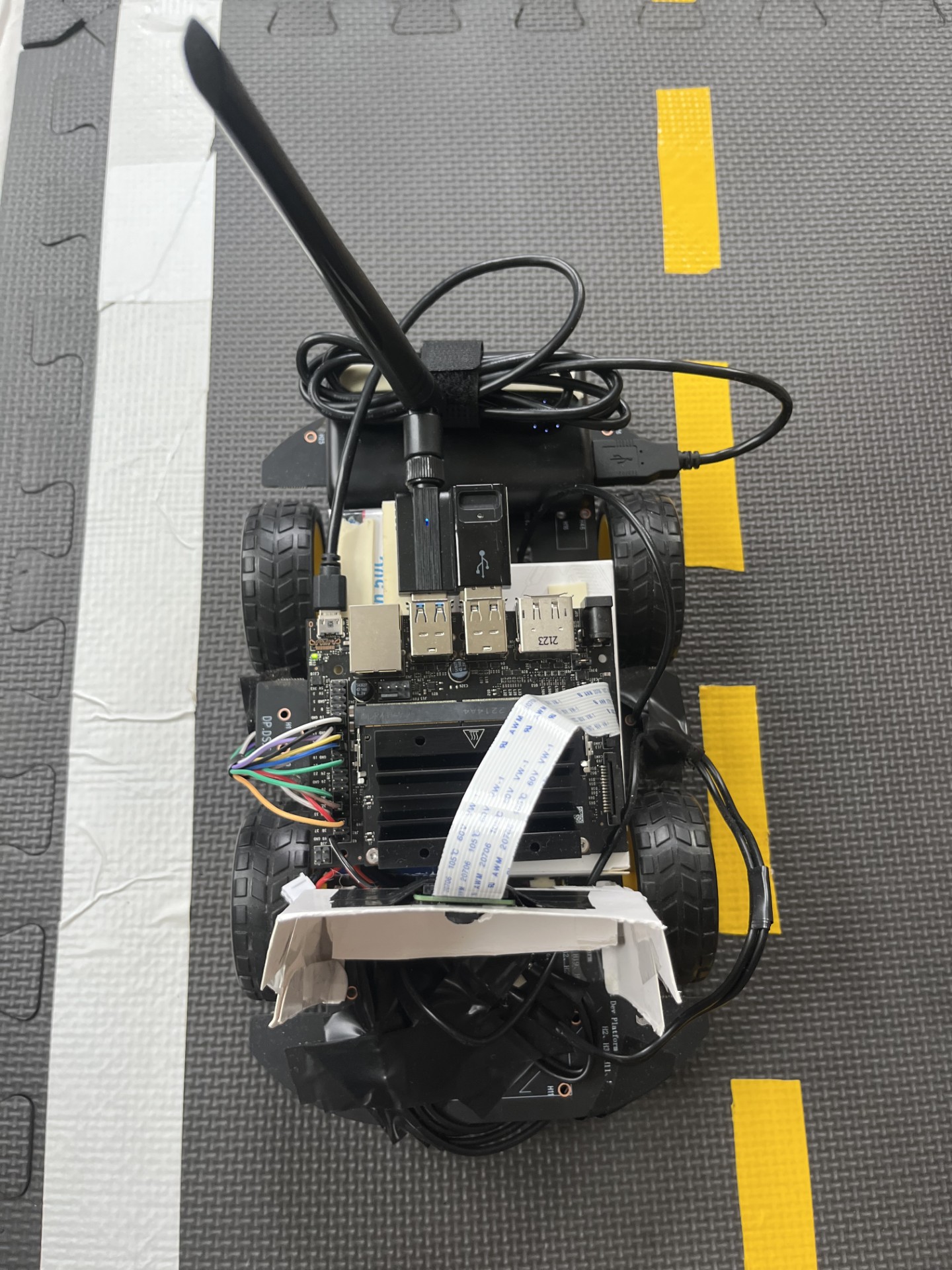
Top View

Back View
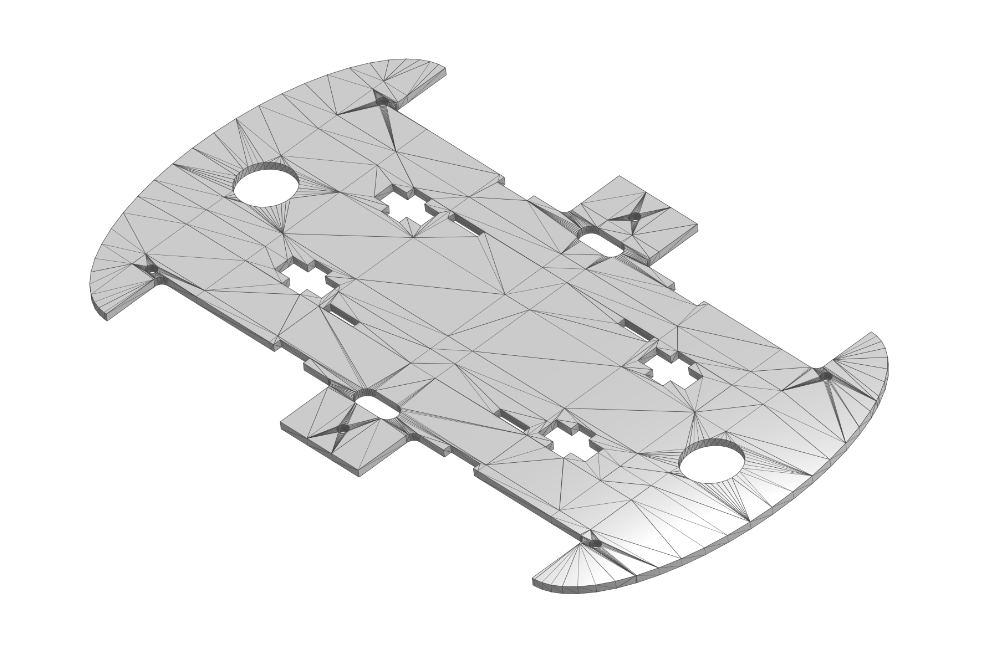
Vehicle Chassis Design
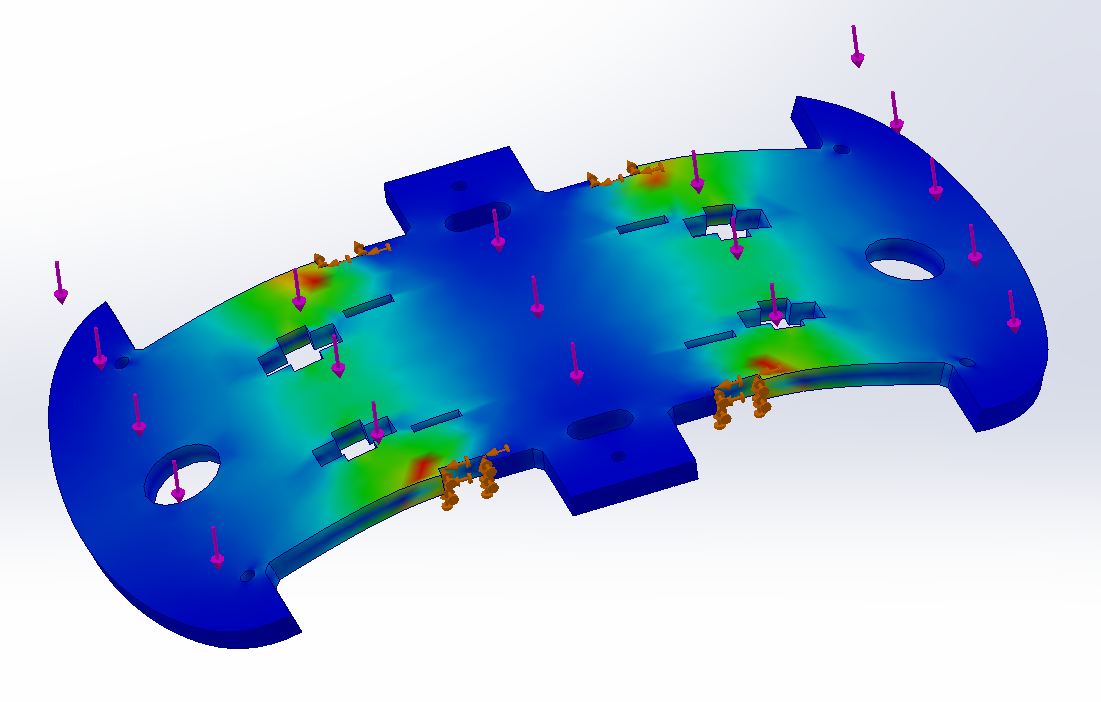
Chassis Stress Testing FEA
Laser Cutting Chassis
Laser Cutting Complete
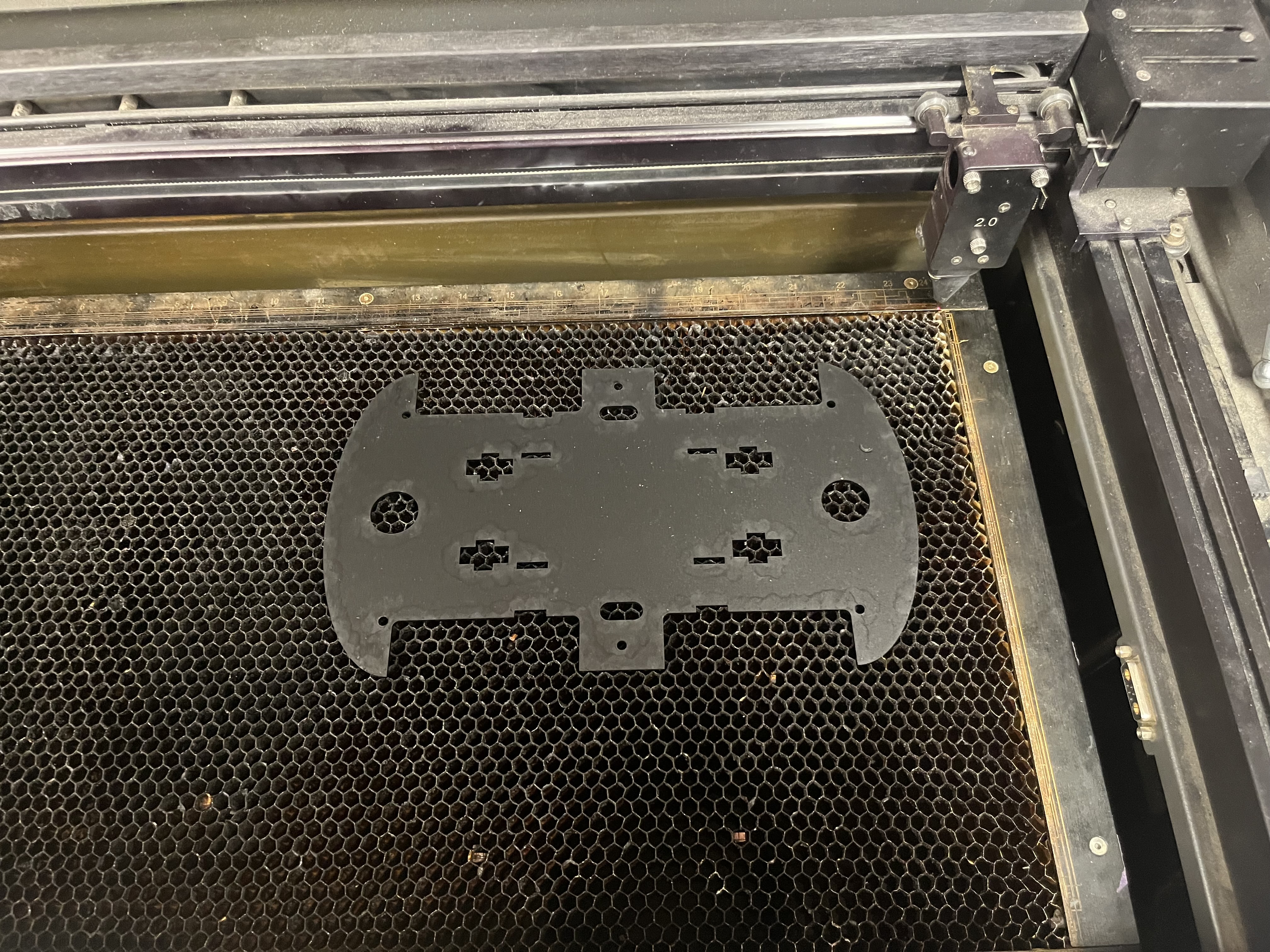
Finished Chassis
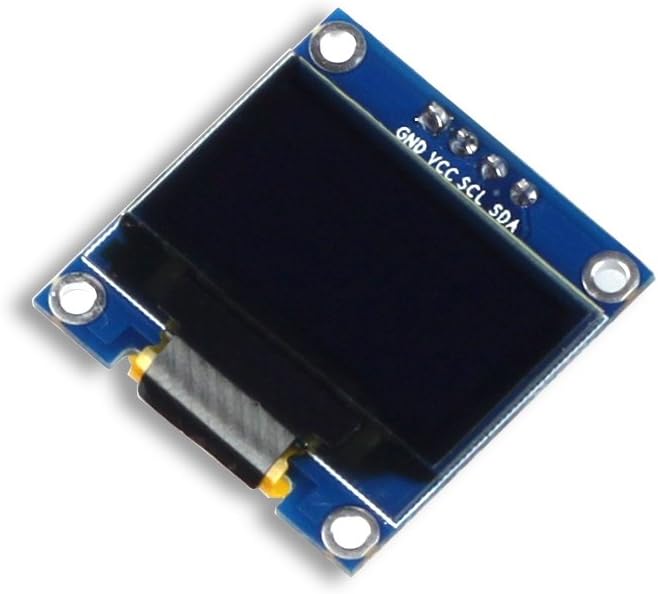
Primary Electronics: