Autonomous Vehicles Research
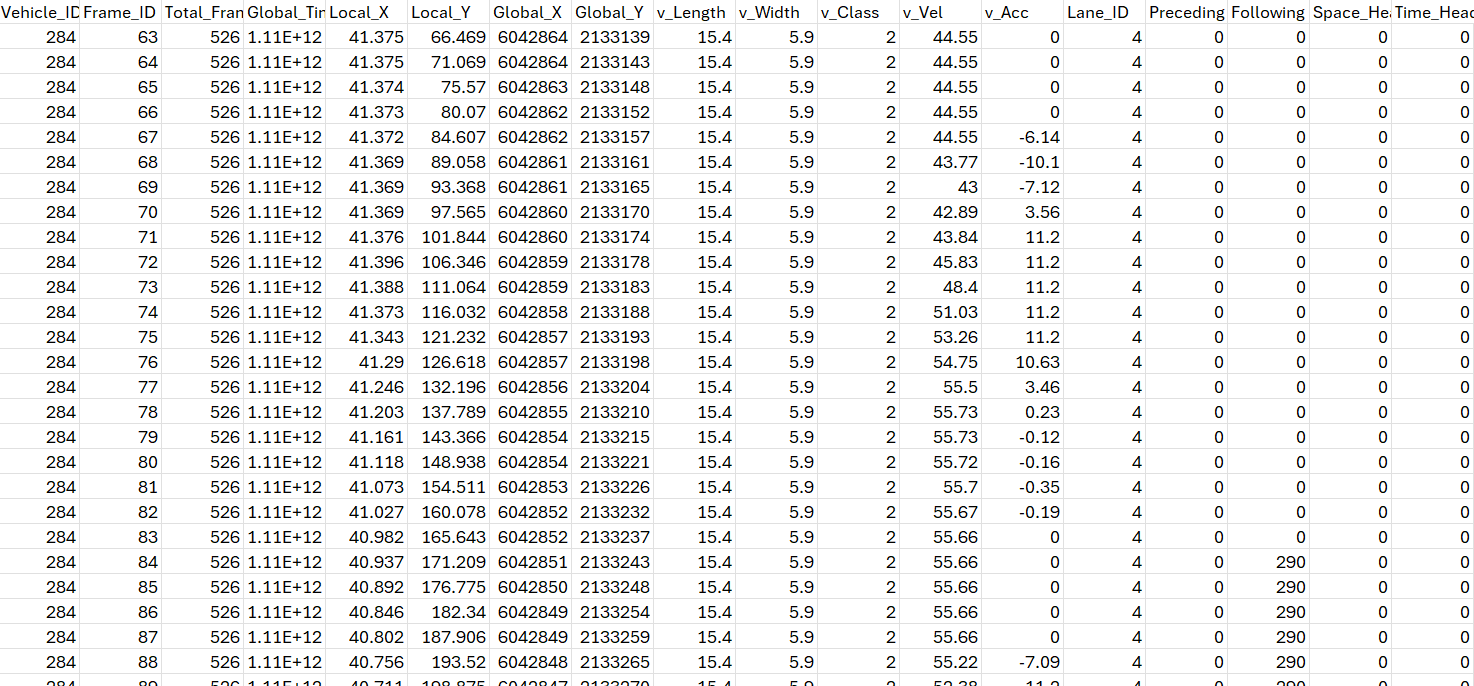
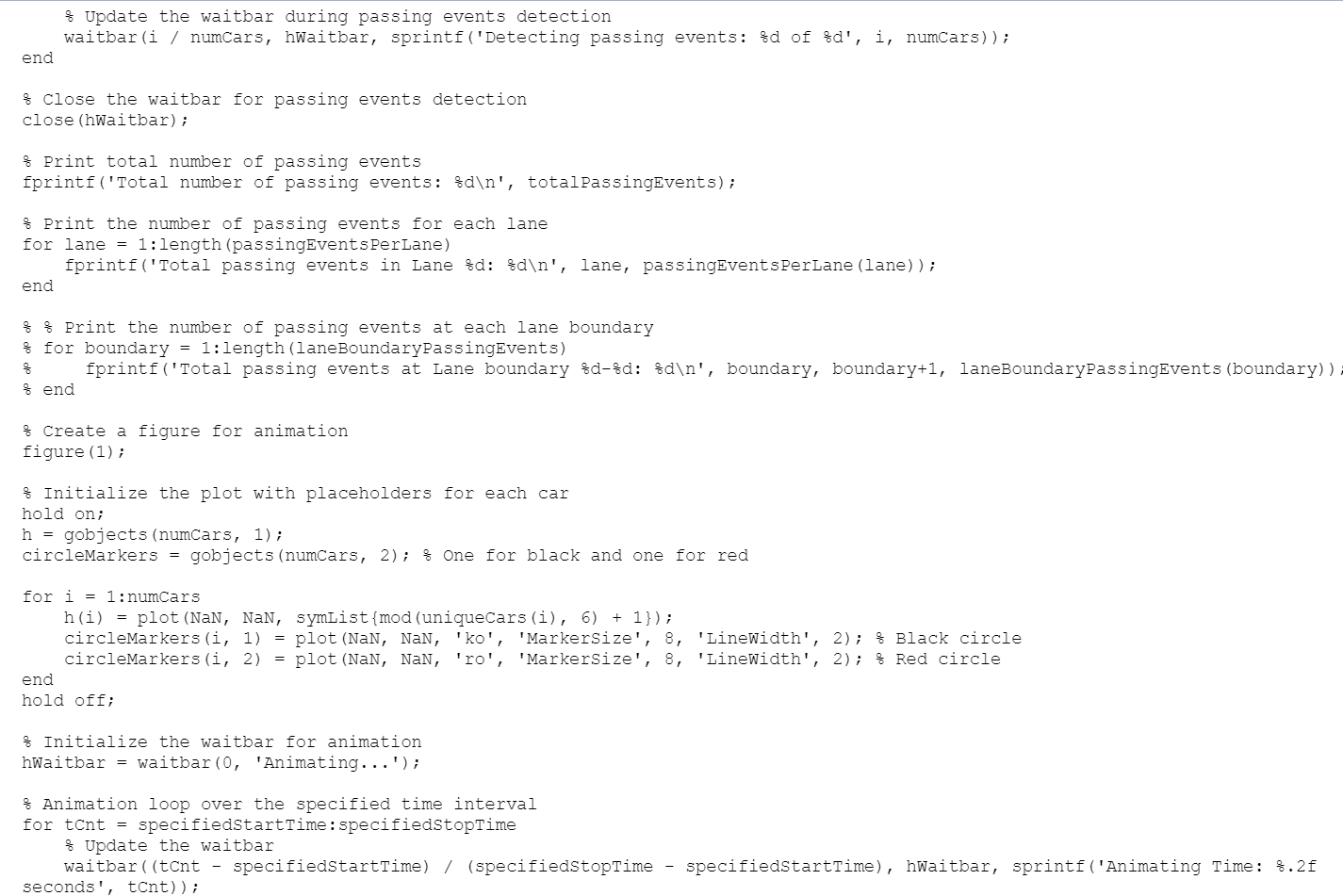
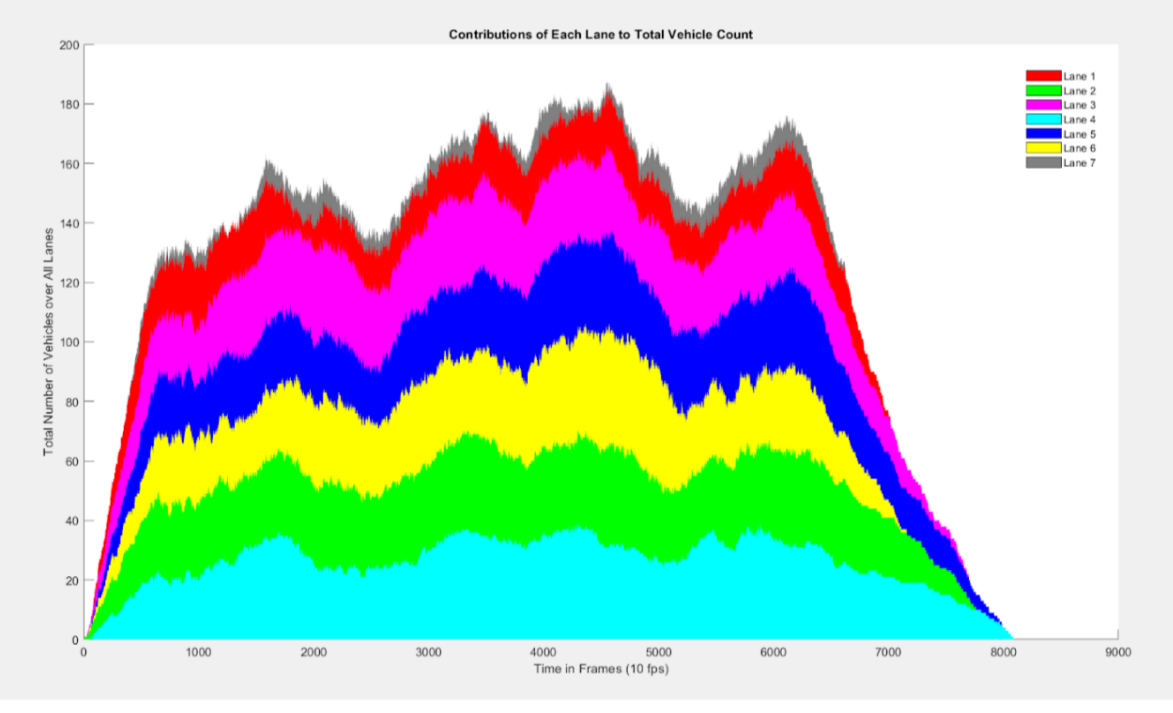
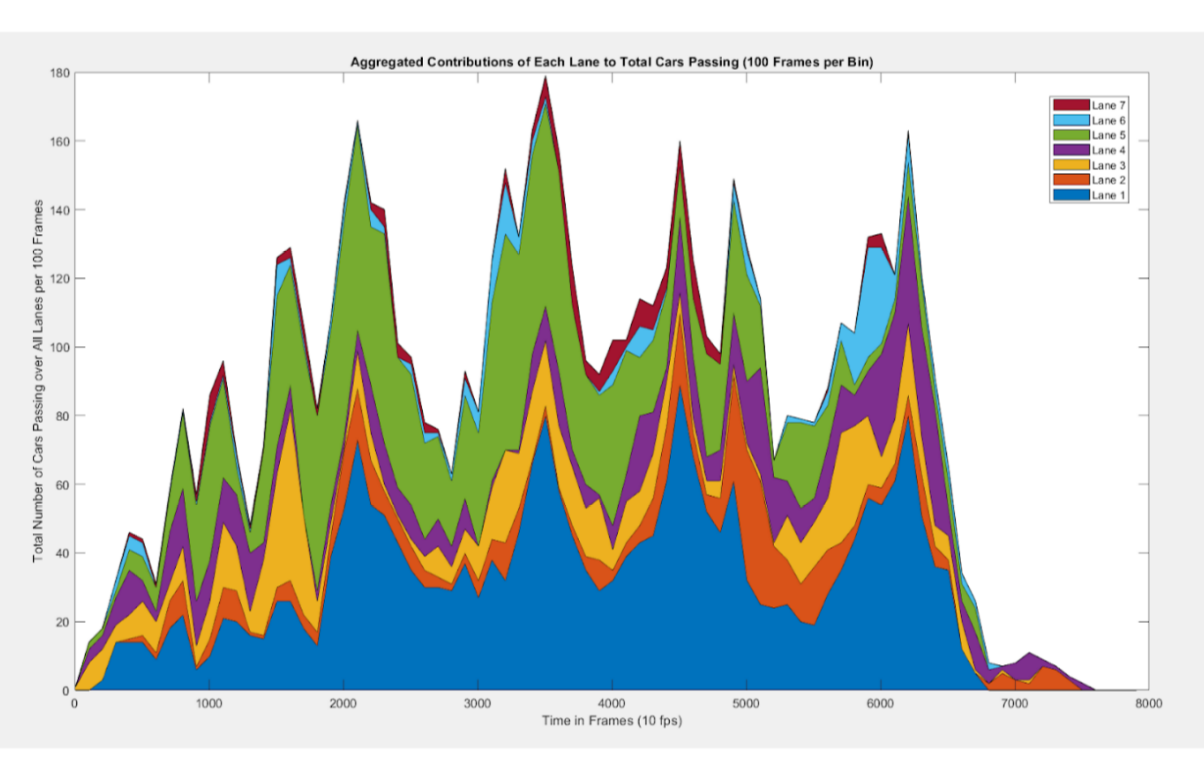
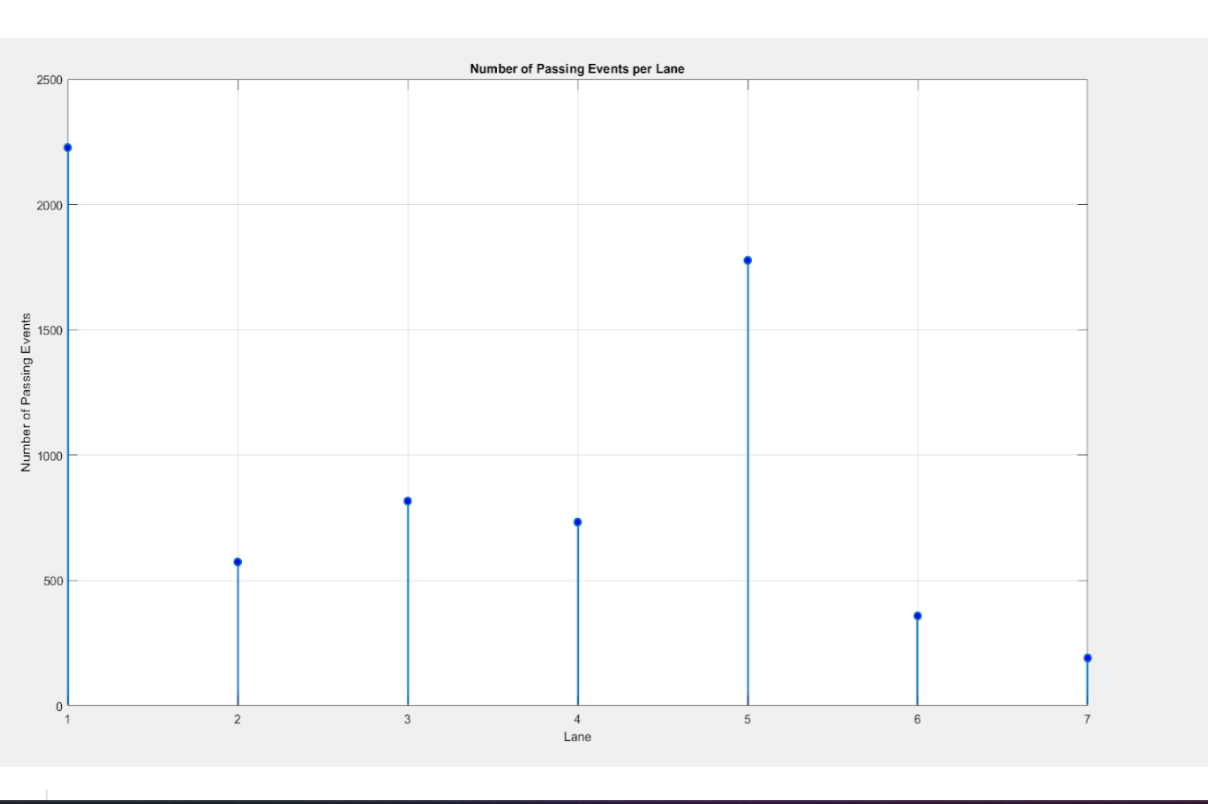
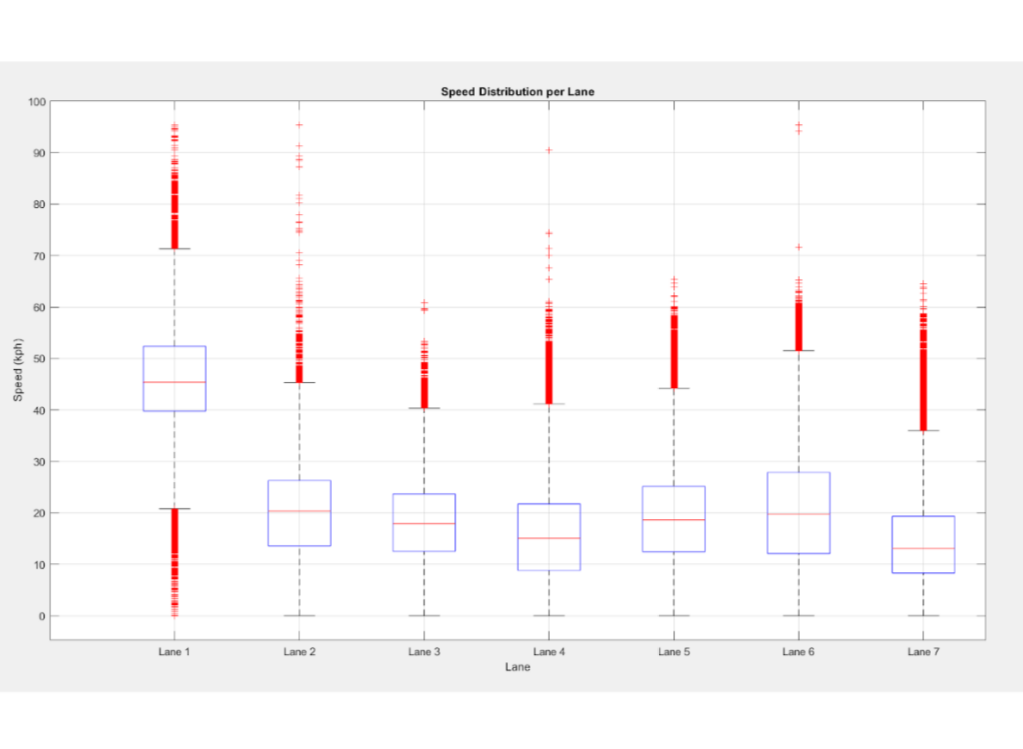
Research project with Professor Jason Rife developing novel control, navigation, and interface technologies to enable safe human-robot interactions in automated vehicle operations. Using MATLAB and Python, I analyzed data from the US Department of Transportation to evaluate vehicle interactions and identify patterns in velocity distributions and passing events to help validate and bound navigation performance. I also developed logical methodologies, graphical data analysis, and a dynamic spot-check animation to enhance system verification and performance.